智能粘附材料具有粘附性快速切换、高调节比和精确控制的特性,在微操作和制造等领域具有巨大的应用潜力。尽管现有研究取得了重大进展,但是高效、稳健的智能粘附材料仍然缺乏。近期,李翔宇教授团队基于团队前期提出的通过在粘附界面人为地产生初始裂纹的方式实现粘附性的调控,开发和设计了一种利用外部磁场驱动磁性触手扭转变形以调控粘附性的智能粘附材料。这种智能粘附材料可以在小于1秒的响应时间内实现从强粘附到弱粘附的调控,调节能力超过50倍。相关研究成果以“Magnetically actuated adhesives with switchable adhesion”为题发表在Advanced Functional Materials上。

研究人员利用外部磁场以非接触的方式驱动磁性触手扭转变形,不仅能在粘附界面产生初始裂纹,使得粘附性大幅降低,还能对目标物体产生推开的作用效果。相比较团队前期的工作,这种智能粘附材料的粘附性调控范围更大。磁驱动粘附材料的粘附性调控机理如图1所示。此外,研究人员根据上述机理,对磁驱动粘附材料从粘附界面的失效形式、裂纹的扩展方式以及推开力的作用效果三个方面进行结构设计。针对粘附界面的失效形式,根据有限元数值计算结果分析了粘附界面的应力分布情况,解释了随着端头直径的增大粘附界面初始裂纹的产生位置由粘附界面的边缘向中心转变的内在原因,提出既能满足粘附性调控机理又能实现最大粘附性的结构尺寸。对于裂纹的扩展方式,研究人员根据铁木辛柯梁理论和最小势能原理得到初始裂纹长度随外部磁场强度的变化规律,得到能满足裂纹扩展到主要粘附区域的结构尺寸的临界值。此外,研究人员通过理论分析得到磁性触手结构尺寸对推开力的影响规律,并得到实验结果的佐证。
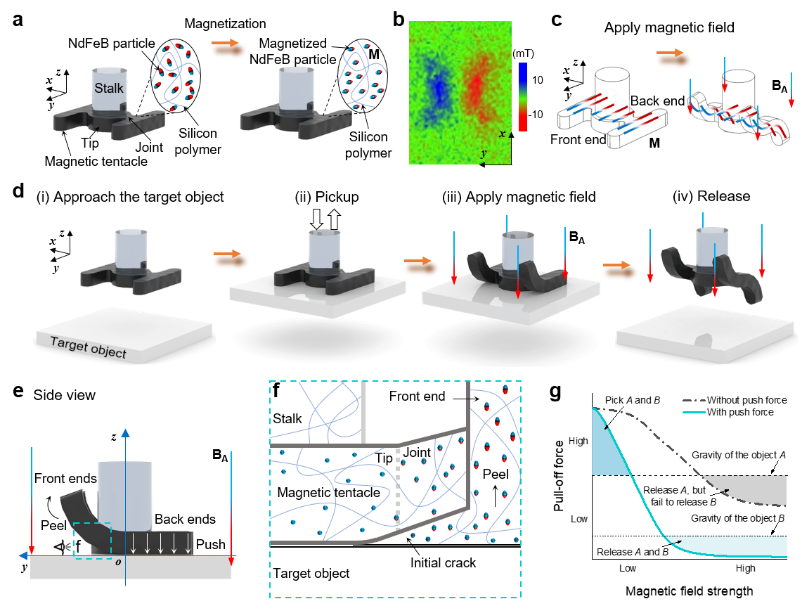
图1磁驱动粘附材料的粘附性调控机理
磁驱动粘附材料在选择性拾取和拾取与放置两种工作模式下可以实现粘附性调控范围为50倍(磁场强度在300mT内)和30倍(磁场强度在400mT内)。磁驱动粘附材料可以被开发用于平整和弯曲表面物体的拾取和放置,例如研究人员开发设计的具有点对点功能的选择性拾取装置,如图2所示。磁驱动粘附材料也可以应用于按需脱附的应用场景。例如,生物体内需要定期更换的电子元件,在外部磁场的驱动下,粘贴有磁驱动粘附材料的电子元件从体内的集成平台按需脱附,实现对体内电子元件的非侵入式的操控。如图3展示了食道内用于检测胃反酸电子元件的按需脱附操作。
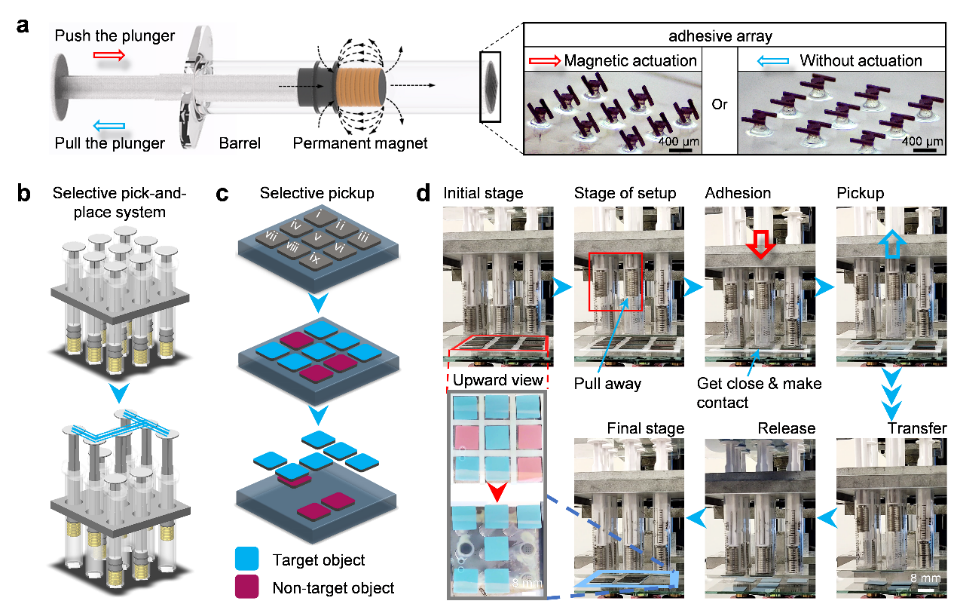
图2具有点对点功能的选择性拾取和放置装置
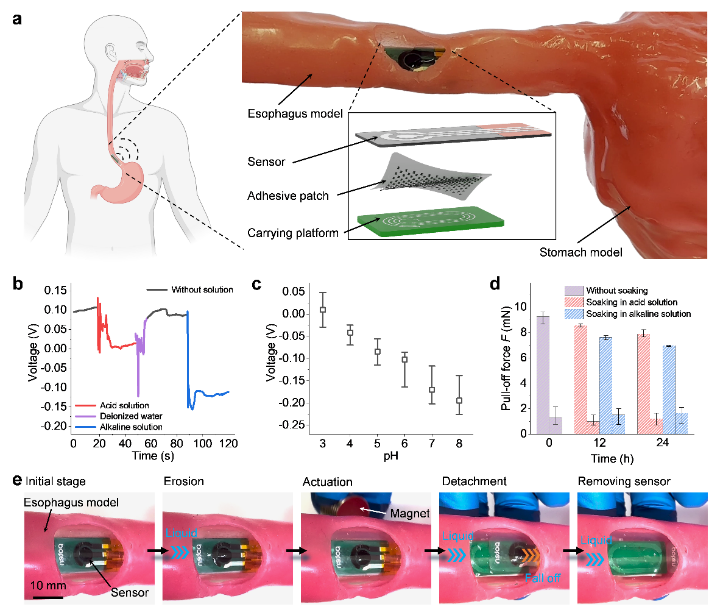
图3检测胃反酸电子元件的按需脱附操作
澳门永利唯一官网304李翔宇教授为文章的通讯作者。赵晋生博士为文章的第一作者,目前在香港中文大学进行博士后研究工作。该研究成果还得到香港中文大学张立教授团队和澳门永利唯一官网304师明星教授团队的帮助和支持。该研究成果得到国家自然科学基金(12072297, 12192210和12192211)的资助。澳门永利唯一官网304李翔宇教授团队近年来着力于接触、粘附以及多孔介质方面的研究,相关成果在顶级期刊JMPS、IJES、IJSS、CMAME、AM和AFM发表。



